Short Bio
I earned my Ph.D. in Computer Science from Purdue University in 2024, under the esteemed guidance of Samuel Conte Professor Xiangyu Zhang.
Previously, I obtained my bachelor’s degree with distinction in Computer Science from Wuhan University (WHU), and I was fortunate to be advised by Prof. Xiaoguang Niu (WHU) and Prof. Jiannong Cao (PolyU) during my undergraduate studies.
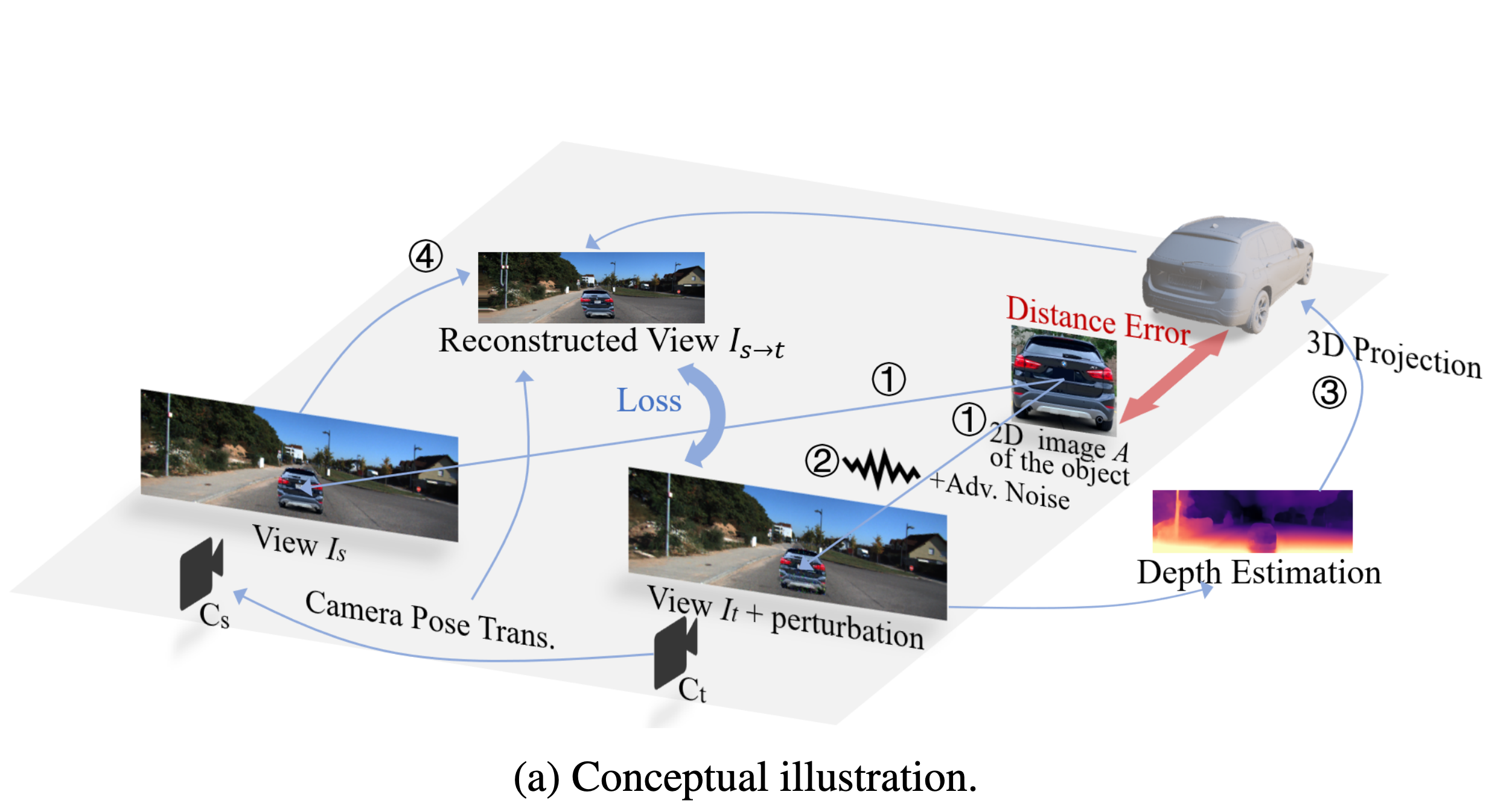
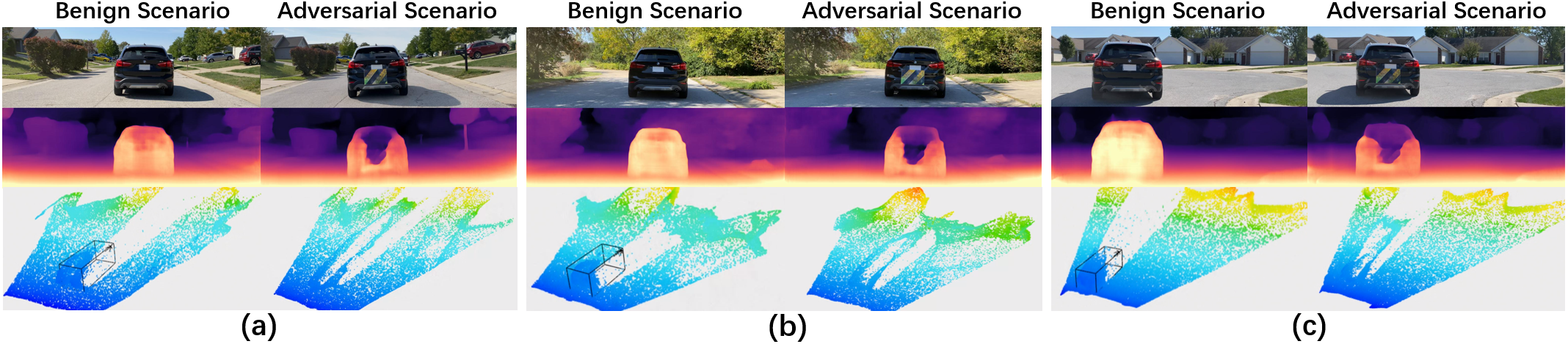
My research interest lies at the intersection of Artificial Intelligence and Security, and I specialize in Trustworthy Machine Learning. Specifically, I focus on enhancing the robustness and security of AI-driven applications such as 3D perception, autonomous driving, robotic systems, etc. Additionally, I explore security topics around AI-generated content (AIGC) and foundation models/LLM.
-
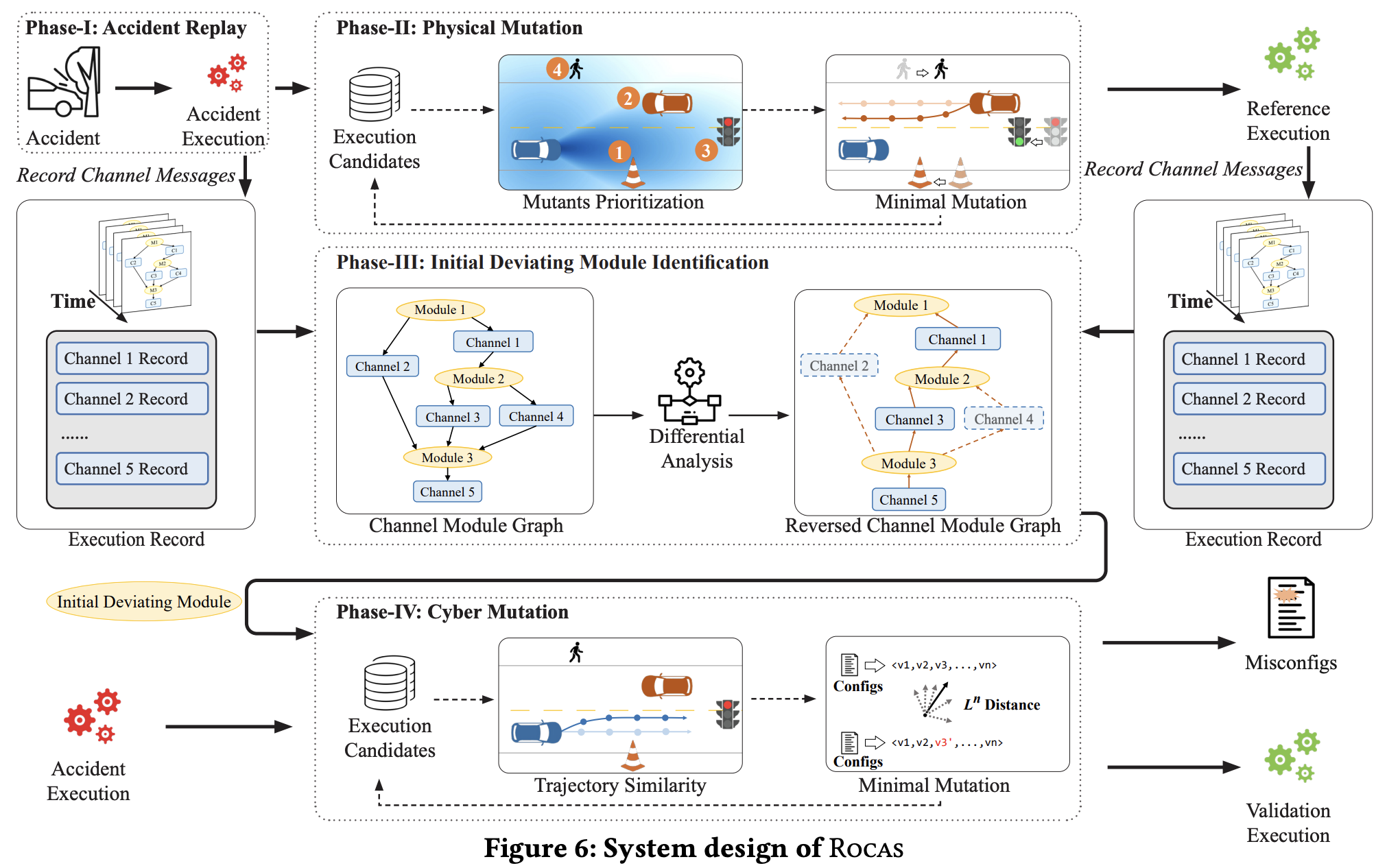 ASE'24
ASE'24
Shiwei Feng, Yapeng Ye, Qingkai Shi, Zhiyuan Cheng, Xiangzhe Xu, Siyuan Cheng, Hongjun Choi, Xiangyu Zhang
IEEE/ACM International Conference on Automated Software Engineering (ASE'24), 2024.
-
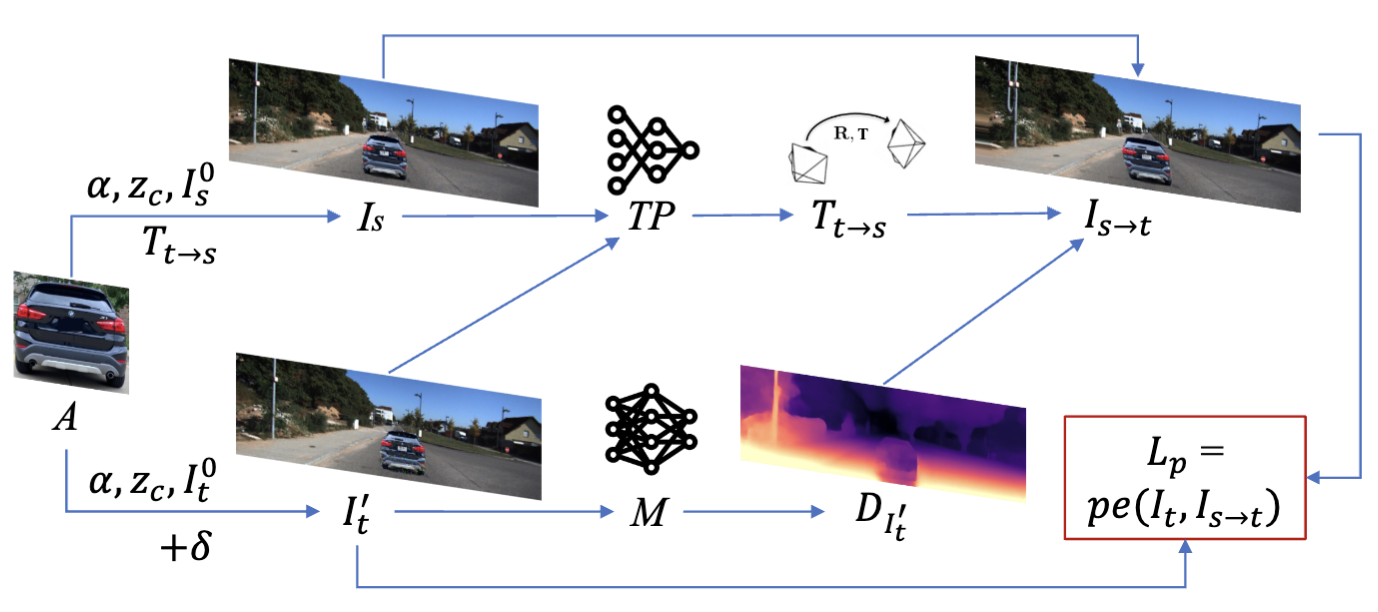 TPAMI'24
TPAMI'24
Zhiyuan Cheng, Cheng Han, James Liang, Qifan Wang, Xiangyu Zhang, Dongfang Liu
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024.
-
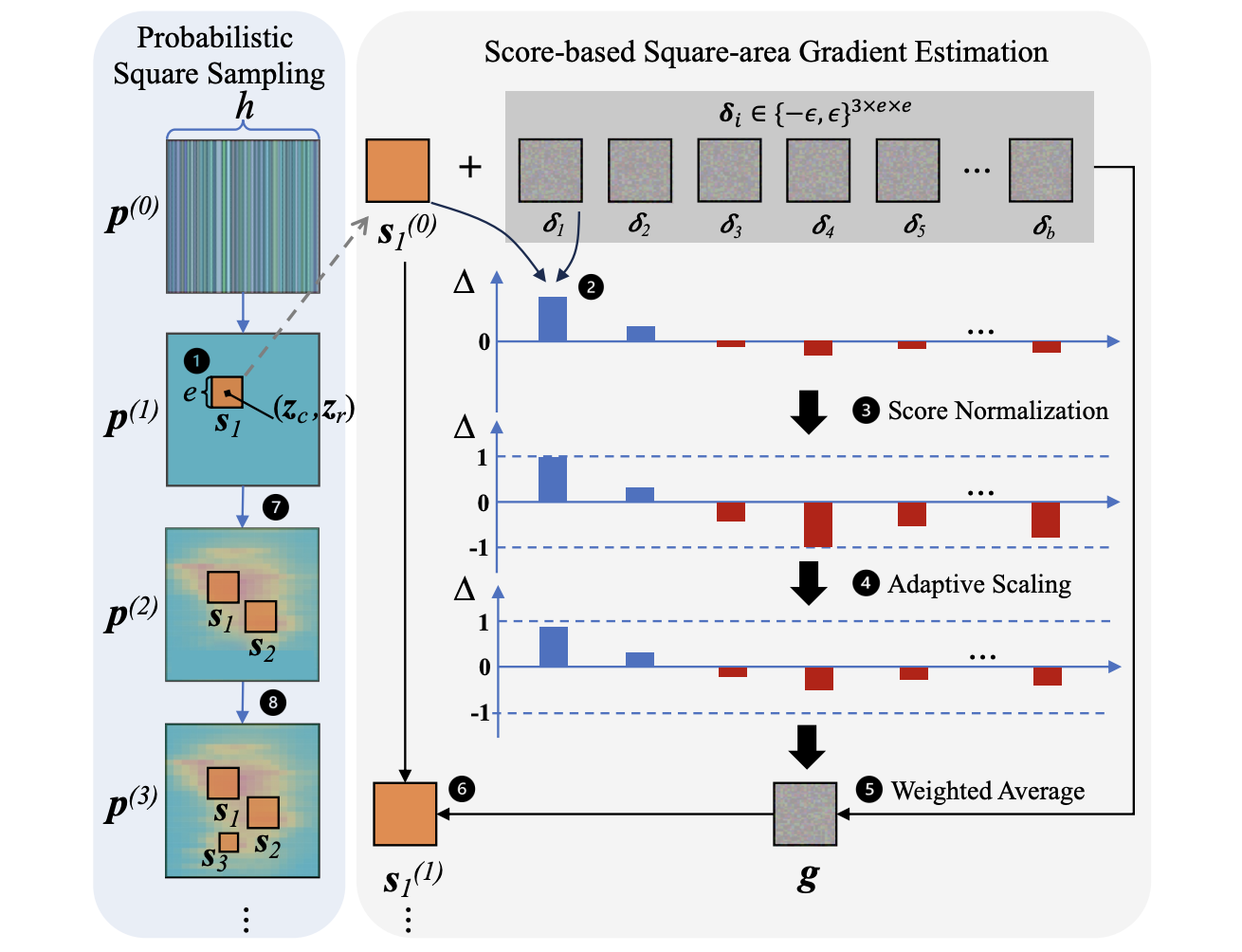 ICML'24
ICML'24
Zhiyuan Cheng, Zhaoyi Liu, Tengda Guo, Shiwei Feng, Dongfang Liu, Mingjie Tang, Xiangyu Zhang
International Conference on Machine Learning (ICML), 2024.
-
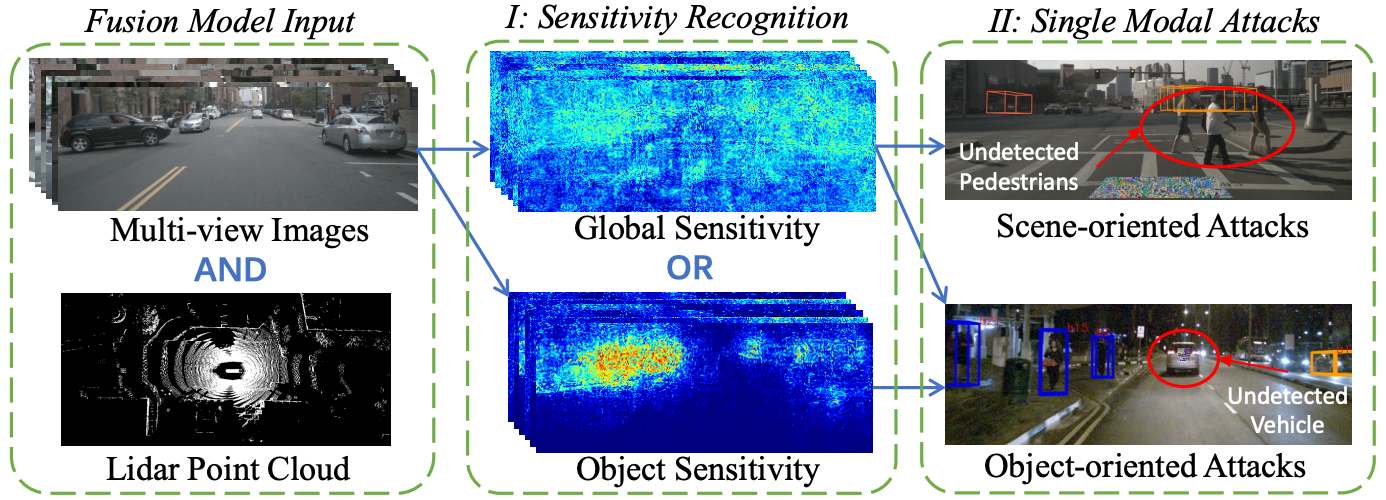 ICLR'24
ICLR'24
Zhiyuan Cheng, Hongjun Choi, Shiwei Feng, James Chenhao Liang, Guanhong Tao, Dongfang Liu, Michael Zuzak, Xiangyu Zhang
International Conference on Learning Representations (ICLR), 2024.
-
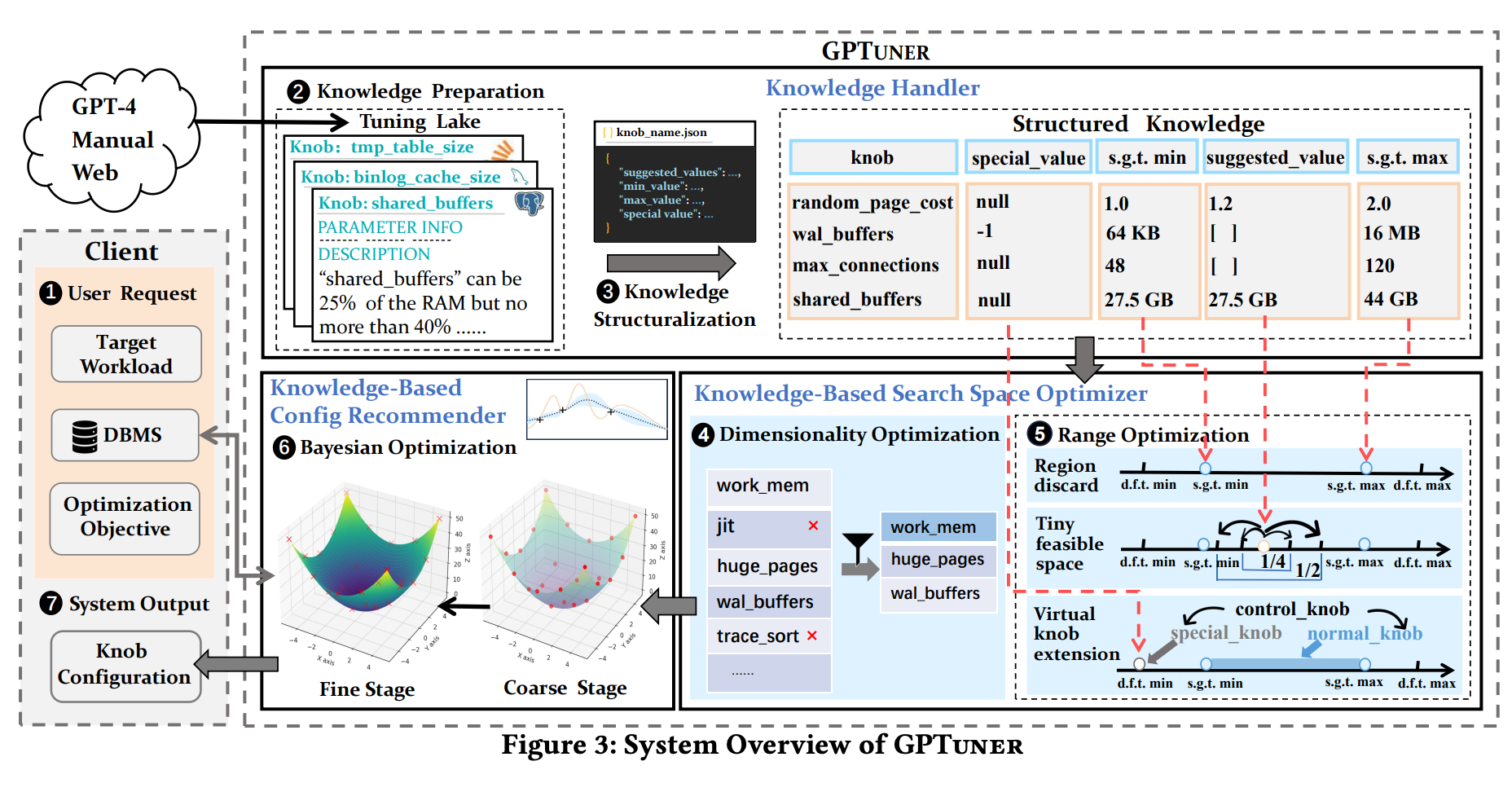 VLDB'24
VLDB'24
Jiale Lao, Yibo Wang, Yufei Li, Jianping Wang, Yunjia Zhang, Zhiyuan Cheng, Wanghu Chen, Mingjie Tang, Jianguo Wang
International Conference on Very Large Data Bases (VLDB), 2024.
PDF
BibTex
ACM SIGMOD Research Highlight Award
-
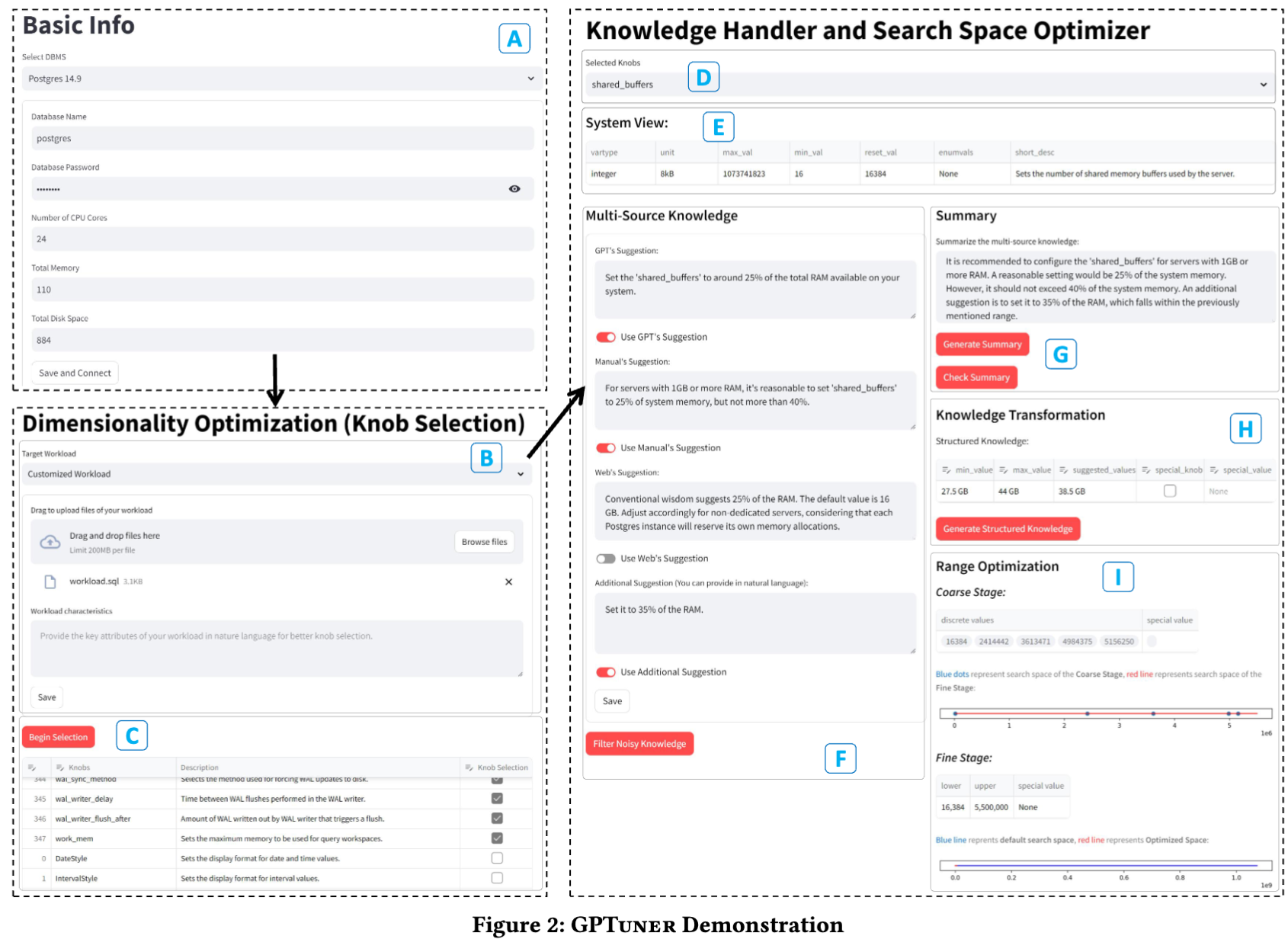 SIGMOD'24
SIGMOD'24
Jiale Lao, Yibo Wang, Yufei Li, Jianping Wang, Yunjia Zhang, Zhiyuan Cheng, Wanghu Chen, Mingjie Tang, Jianguo Wang
International Conference on Management of Data (SIGMOD), 2024.
-
 ICLR'23
ICLR'23
Zhiyuan Cheng, James Liang, Guanhong Tao, Dongfang Liu, Xiangyu Zhang
International Conference on Learning Representations (ICLR), 2023.
-
 ECCV'22
ECCV'22
Zhiyuan Cheng, James Liang, Hongjun Choi, Guanhong Tao, Zhiwen Cao, Dongfang Liu, Xiangyu Zhang
European Conference on Computer Vision (ECCV), 2022.
-
 NDSS'22
NDSS'22
Hongjun Choi, Zhiyuan Cheng, Xiangyu Zhang
Network and Distributed System Security Symposium (NDSS), 2022.
Teaching
Talks
Towards Secure and Robust Perception of Autonomous Vehicles in the Physical World
- College of Computer Science, Chongqing University, Jan. 2024
Adversarial Training of Self-supervised Monocular Depth Estimation
Experience
Honors & Awards
- Conference Travel Grant Awards, ICLR 2023/24, ICML 2024
- Ross Fellowship, Purdue University, 2019
- Outstanding Undergraduate Thesis, Wuhan University, 2019
- The Samsung Scholarship, Samsung Group, 2017
- National Scholarship, China, 2016
Services
Program Committee/Reviewer
- International Conference on Learning Representations (ICLR), 2025
- AAAI Conference on Artificial Intelligence (AAAI), 2023-2025
- European Conference on Computer Vision (ECCV), 2024
- IEEE Transactions on Information Forensics and Security (T-IFS), 2024
- IEEE Sensors Journal, 2024
- International Joint Conference on Artificial Intelligence (IJCAI), 2023
Sub-Reviewer
- International Conference on Automated Software Engineering (ASE), 2023
- AAAI Conference on Artificial Intelligence (AAAI), 2022
Conference Volunteer
- International Conference on Learning Representations (ICLR), 2023
Last Update:

